Inhalt
- MAGNET Field - RTK Base/Rover
- Allgemeine Fragen und Antworten (FAQ I)
- Was ist der Unterschied zwischen Referenzstation, Basis (engl. Base) und Rover?
- Welcher Unterschied besteht zwischen dem NTRIP-Verfahren und dem Einsatz einer eigenen Basis?
- Wann kann der Einsatz einer eigenen Basis sinnvoll sein?
- Wie funktioniert eine Basis?
- Was sind Rohdaten?
- Was bedeutet "Einmessen" und "Starten" einer Basis?
- Wie werden die (exakten) Basis-Koordinaten ermittelt?
- Welche Möglichkeiten der Korrekturdatenübertragung von einer eigenen Basis gibt es?
- Welche Frequenzen stehen zur Verfügung?
- Was muss bei der Aufstellung und Einrichtung einer eigenen Basis beachtet werden?
- Die UHF Funk-LED-Anzeige von HiPer HR und HiPer VR
- Arbeit mit MAGNET Field
- Das Base/Rover-RTK-Profil
- Prinzipielle Vorgehensweise
- Methode A: Aufstellung auf bekanntem Punkt, UTM-Abbildung
- Methode B: Direktes Einmessen der Basis mit SAPOS, UTM-Abbildung
- Methode C: Direktes Einmessen mit TopNET live / AXIO-NET, Gauß-Krüger-Abbildung
- Methode D: Direktes Einmessen mit TopNET live / AXIO-NET, UTM-Abbildung
- Methode E: Lokalisation über mehrere Festpunkte (Kontrollpunkte)
- Methode F: Basis korrigieren - Anpassung des Koordinatensystems durch Korrektur der Basisposition
- Methode G: Streckenreduktion - Anpassung des Koordinatensystems durch Transformation in der Ebene
- Die Basis starten im Detail
- Fragen zu MAGNET Field (FAQ II)
- Was tun bei Störungen?
- Links
- Allgemeine Fragen und Antworten (FAQ I)
MAGNET Field - RTK Base/Rover
Hier beantworten wir Fragen zur GNSS-RTK-Methode für Topcon-GNSS-Empfänger mit einer eigenen Referenzstation (Base, Basis) und geben Hinweise zum Einsatz von MAGNET Field.
Allgemeine Fragen und Antworten (FAQ I)
Was ist der Unterschied zwischen Referenzstation, Basis (engl. Base) und Rover?
- Als "Referenzstation" werden eher stationäre Anlagen bezeichnet (z.B. auf Gebäuden), als "Basis" (Base) eher die Anlagen im örtlich wechselnden Einsatz, z.B. auf Baustellen. Die Funktionsweise ist identisch: Aussendung von Korrekturdaten per Funk für die Echtzeit-Vermessung und/oder Speicherung von GNSS-Rohdaten für Postprocessing. Ein Referenzstations-/Basis-Empfänger hat also in jedem Fall während des Betriebs einen festen Standort mit bekannter Position.
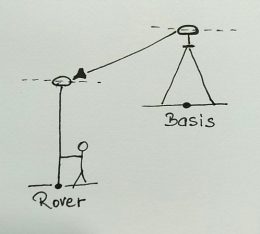
- Der Vermesser (oder eine Baumaschine) ist mit dem "Rover" unterwegs (auf der Baustelle oft nur "Stab" genannt) und erhält - dank der empfangenen Korrekturdaten - präzise Koordinaten mit cm-Genauigkeit.
- Basis und Rover-Empfänger können oftmals getauscht (umkonfiguriert) werden. Je nach Hersteller und Modell können jedoch Funk und/oder die Basis-Funktion (Aussenden von Korrekturdaten) eine kostenpflichtige Option sein.
Welcher Unterschied besteht zwischen dem NTRIP-Verfahren und dem Einsatz einer eigenen Basis?
- Beim NTRIP-Verfahren, einer Variante der RTK-Methode (Real Time Kinematic), genügt 1 Rover, die Korrekturdaten werden über Internet via Mobilfunk bezogen.
- Es fallen dabei laufende Kosten an, die Qualität der Mobilfunkverbindung spielt - neben dem Satellitenempfang - eine entscheidende Rolle für die Qualität der erhaltenen Positionsdaten.
- Die Mobilfunkverbindung ist bidirektional - der Rover sendet seine Position um Korrekturdatenserver und der Server sendet optimale Korrekturdaten einer berechneten, virtuellen Basis in nächster Nähe zum Rover zurück
- Mit jedem Neustart des Rovers oder dem Zurücklegen einer längeren Strecke ändert sich die Position der virtuellen Basis
- Beim RTK-Verfahren mit eigener Basis ist eine einmalige Investition in 2 Empfänger erforderlich samt einer (meist integrierten) Funkausstattung.
- Der Betrieb selbst verursacht - im Falle von Longrange-Bluetooth-Funk - keine laufenden Kosten.
- Bei konventionellem UHF-Funk (70cm-Band, um 433 MHz) ist üblicherweise eine kostenpflichtige Anmeldung bei der zuständigen Behörde (Bundesnetzagentur) erforderlich. Die anfallenden Kosten sind eher gering.
- Die Mobilfunkverbindung ist unidirektional - nach der Konfiguration der Basis arbeitet diese autark, der Rover übermittelt nicht seine Positin an die Basis, die Daten fließen also ausschließlich von Basis zu Rover.
Wann kann der Einsatz einer eigenen Basis sinnvoll sein?
- In Gebieten mit unzureichender Mobilfunkabdeckung
- Bei Anspruch auf höchste (relative) Genauigkeit in Echtzeit bis Sub-Zentimeter
- Im Ausland
- Kostenersparnis bei unterbrechungsfreiem, langandauerndem Betrieb
- Auf Baustellen (Kostenersparnis, Kompatibilität mit der GNSS/Funkausrüstung der Baumaschinen und gleichbleibender 3D-Bezug für die Maschinensteuerung, Absteckung und Vermessung)
- Bei zwingend erforderlicher konstanten Position der Basis, z.B. wenn mehrere Rover mit einer einzigen Basis verbunden sein sollen zwecks Erhalt stimmiger, hochgenauer relativer Positionen
Wie funktioniert eine Basis?
Bestandteil der Korrekturdaten, die die Basis aussendet, sind sich beständig ändernde Messwerte für jeden getrackten Satelliten (Rohdaten, Beobachtungsdaten, observations) sowie ein Satz von unveränderlichen Parametern wie Koordinaten der Basis, Angaben zur Antenne und gegebenenfalls Transformationsinformationen. Manche dieser Parameter werden in die Basis zu Beginn des Betriebs eingegeben (Koordinaten, Antennenhöhe), sind bereits ab Werk fest einprogrammiert (z.B. Angaben zum Antennentyp) oder werden mit den Korrekturdaten übermittelt (z.B. Trafoparameter).
Im Rover bewirken die Korrekturdaten eine Verbesserung der Position durch Verminderung der Streuung. Die exakte Position berechnet sich relativ zur Basis in Sekundenschnelle (und nicht durch stundenlange Mittelung der unkorrigierten Position). De facto wird also im Rover aus dem in Echtzeit berechneten Basis-Rover-Entfernungsvektor (baseline) und den übertragenen Basis-Koordinaten die exakte Position des Rovers ermittelt (mathematisch: Methode des "polaren Anhängens", ähnlich der Tachymetrie).
WICHTIG ZUM WEITEREN VERSTÄNDNIS
- Der Basis-Empfänger speichert die im zugewiesene Position im GPS-Bezugssystem, also als geozentrische WGS84/ETRS89-Koordinaten(*) (karthesisch XYZ oder Breite/Länge mit ellipsoidischer Höhe über dem WGS84/ETRS89-Rotationsellipsoid).
- Im Rover-Empfänger erfolgen Berechnungen und Positionsausgabe ebenfalls im WGS84/ETRS89-Bezugssystem.
- In der Anwendersoftware erfolgen alle weiteren Berechnungen:
- Ausgabe von UTM-Koordinaten (die Angaben von XYZ, Breiten/Längengrade und Rechtswert/Hochwert mit ellips. Höhe sind gleichwertig, eine Umrechnung ist immer verlustfrei möglich)
- Höhenkorrektur der ellipsoidischen Höhe auf Höhe über dem Meeresspiegel (NHN) z.B. durch Einbindung einer Geoiddatei
- Anpassung des Koordinatensystems durch Transformation/Lokalistation, z.B.
- Umrechnung in die Gauß-Krüger-Abbildung
- Herausrechnen eines Offsets, den eine nicht exakt eingemessene Basis verursacht
Was sind Rohdaten?
Unter GNSS-Rohdaten versteht man üblicherweise die Original-Messwerte (Beobachtungen, observations) wie Ergebnisse aus Code- und Phasenmessungen, Pseudoranges, SNR, Dopplerverschiebung sowie Almanach resp. Ephemeriden (weniger genaue resp. präzise Bahndaten der Satelliten). Diese Rohdaten können im Empfänger gespeichert und für nachträgliche Positionsberechnungen herangezogen werden (Postprocessing). Ein Ausschnitt dieser Rohdaten, teilweise weiterverarbeitet, werden als sog. "Korrekturdaten" von einer Referenzstation/Basis an einen Rover gesendet zwecks Verbesserung der Rover-Position (RTK-Methode, Real Time Kinematic).
Damit nicht zu verwechseln sind die "Rohdaten", die direkt im Rover entstehen resp. aus der Vermessungssoftware exportiert werden können, wenn das RTK/NTRIP-Verfahren angewendet wird, Koordinaten also in Echtzeit erfasst werden. "Rohdaten" sind in diesem Fall die übermittelten Koordinaten der Basis sowie die im Rover berechneten baseline-Vektoren Basis-Rover, dazu kommen Antennenhöhen, Datum/Uhrzeit und diverse Qualitätskriterien wie PDOP, Korrelatinsmatrix etc.
Was bedeutet "Einmessen" und "Starten" einer Basis?
Damit eine Basis "richtige" Korrekturdaten aussendet, die vom Rover wie gewünscht verarbeitet werden können, müssen zwei grundlegende Dinge beachtet werden:
- Der Basis müssen möglichst korrekte ETRS89-Koordinaten ihres Standorts einprogrammiert werden (*). Die Koordinatenangabe bezieht sich dabei auf die Lage und Höhe der Antenne. Sind die Basis-Koordinaten nicht oder nur näherungsweise bekannt, müssen sie ermittelt werden ("Einmessen").
- Die ausgewählte Funktechnik muss für Basis und Rover kompatibel sein.
Das "Starten" einer Basis beinhaltet also
- die Auswahl der Parameter für die Funkübertragung
- die Einprogrammierung von exakten oder Näherungskoordinaten und
- das Starten des Funkmodems zur Aussendung der Korrekturdaten
WICHTIG ZUM WEITEREN VERSTÄNDNIS
- Nach dem Start der Basis arbeitet diese autark und hat keine Verbindung mehr zum Feldrechner/Software, da letztere nun mit dem Rover verbunden sind.
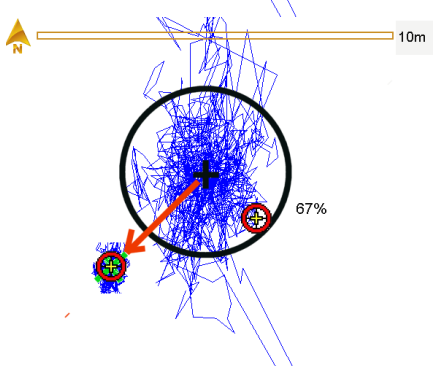
- Die Basis liefert immer eine unkorrigierte, "autonome" Position mit entsprechender Schwankung in Lage und Höhe, ist also nie "FIXED". Dies kann im Status in MAGNET Field beobachtet werden.
- Das Aussenden der Korrekturdaten erkennt man am Blinken der Funk-LED (abwechselnd rot/grün)
- Die Kommunikation der Basis ist unidirektional, d.h. es werden nur Korrekturdaten in Richtung Basis>Rover ausgegeben
- Der Rover sendet keine Position an die Basis (Unterschied zum NTRIP-Verfahren!)
- Die Sendeleistung des Funkmodems spielt nur bei der Basis eine Rolle, nicht beim Rover
- Je nach Hersteller ist eine eingeschränkte Überwachung der Basis vom Rover aus möglich durch Auswertung spezieller RTCM-Messages
Wie werden die (exakten) Basis-Koordinaten ermittelt?
Ähnlich wie in der Tachymetrie wird die Basis auf einem Punkt mit bekannten Koordinaten aufgestellt. Sind die Koordinaten nicht bekannt, müssen sie direkt oder indirekt ermittelt werden. Die Methoden unterscheiden sich hinsichtlich des gewünschten Koordinatensystems und der Verfügbarkeit von Festpunkten mit bekannten Koordinaten.
Details weiter unten unter Arbeit mit MAGNET Field
Welche Möglichkeiten der Korrekturdatenübertragung von einer eigenen Basis gibt es?
- Funk im 70cm-Band (UHF) um 433-434MHz bis max. 500mW, siehe https://support.drbertges.com/?p=4086. Diese Methode ist seit Jahrzehnten Standard, die Modems (englisch: radio) sind oft im GNSS-Empfänger integriert und können optional gegen Aufpreis aktiviert werden. Die Reichweite kann, je nach Ausgangsleistung und verwendeter Antenne, 1-3km betragen. Eine kostenpflichtige Anmeldung bei der Bundesnetzagentur ist erforderlich.
- Funk im 70cm-Band mit hoher Leistung - nur für stationäre Referenzstationen vorgesehen => Bundesnetzagentur!
- Funk im 868MHz-Band (lizenzfrei)
- Bluetooth mit hoher Reichweite. Hierbei werden spezielle Bluetooth-Komponenten verbaut. In Verbindung mit Spezialantennen können Reichweiten bis 300m erreicht werden, teilweise (mit externen Antennen mit hoher Verstärkung) bis 1000m. Ein Longrange-Bluetooth-Modul kann üblicherweise als BT-USB- oder Seriell-Adapter an jedes Gerät resp. Computer angebracht werden. In der Vermessung, speziell in der Tachymetrie, hat der "Longrange-Bluetooth" den UHF-Funk abgelöst.
- Andere Übertragungsmöglichkeiten wie Mobilfunk (cellular, cell phone), WLAN, Zigbee etc. sind natürlich ebenfalls möglich, aber weniger verbreitet.
Welche Frequenzen stehen zur Verfügung?
Weitere Details hier: https://support.drbertges.com/?p=4086, speziell hier.
Was muss bei der Aufstellung und Einrichtung einer eigenen Basis beachtet werden?
-

HiPer VR als mobile Referenzstation auf einem Stativ 
Referenzstation HiPer HR in einem Naturschutzgebiet, externe Antenne noch nicht angebracht Standort: Die Basis muss stabil, reproduzierbar und mit freier Sicht zum Himmel aufgebaut werden, z.B. auf einem Container (Magnetfuß), einem stabilen Gestell, einem Kamin oder auf einem Mast oder Gebäudeoberkante (z.B. an einem 90°-Winkel mit Loch und einer 5/8"-Schraube). Bei mehrtägigen Vermessungsarbeiten ist eine Aufstellungen auf einem Stativ, das immer wieder abgebaut und neu aufgestellt werden muss, z.B. über einem Festpunkt mit bekannten Koordinaten, weniger empfehlenswert.
Bei manchen Empfängermodellen kann eine externe GNSS-Antenne angebracht werden (HiPer VR ohne Mobilfunk, HiPer HR, MR-2, NET-G5). Dies ermöglicht die sichere Unterbringung des teuren Geräts in einem Gebäude oder Container, eine bequeme Stromversorgung sowie eine einfache Montage der leichten externen Antenne. - Aufstellung über einem Festpunkt:
- Methode Stativ: Üblicherweise wird ein Stativ mit Dreifuß genutzt, der penibel auf den Bodenpunkt zentriert werden muss. Die Ermittlung der Höhe des Empfängers erfolgt "schräg" mit einem Maßband vom Bodenpunkt zur Messmarke nach Vorschrift (siehe Handbuch zum Empfänger).
- Methode Stab: Alternativ kann der Empfänger auf einem Stab, analog eines Rovers, mit Hilfe eines Stabstativs auf dem Festpunkt aufgestellt werden. dies bedingt, dass die Libelle am Stab perfekt iustiert ist. Die Empfängerhöhe wird vertikal gemessen und sollte nicht zu hoch sein. Die ideale senkrechte Ausrichtung des Stabs kann zusätzlich mit einem Lattenrichter kontrolliert werden.
- Funkantenne: An der Basis muss immer die Funkantenne angebracht sein. Funken ohne Antenne kann zu Beschädigung des Funkmoduls führen.
- Stromverbrauch: Bedenken Sie den vermehrten Stromverbrauch im Funkbetrieb (Ersatzakkus, Anschluss an einen externen Akku oder ans Stromnetz).
- Funk-Einrichtung: https://support.drbertges.com/?p=4086
- Einmessung der Basis:
- Bei direkter Einmessung der Basis (Methode B,C,D) mit NTRIP-Korrekturdaten (NTRIP, SAPOS, TopNETlive, AXIO-NET...) muss mit höchster Sorgfalt erfolgen. Achten Sie auf guten Satelliten- und Korrekturdatenempfang, lange Messzeiten (z.B. 60sec), mehrmalige Messungen und Mittelung im Abstand von ca. 10-20 min.
- Bei indirekter Einmessung (Lokalisation, Methode E) müssen möglichst viele Kontrollpunkte möglichst gleichmäßig auf dem Areal verteilt sein.
- Einrichtung der Basis in MAGNET Field - siehe nachfolgender Abschnitt "Arbeit mit MAGNET Field"

Die UHF Funk-LED-Anzeige von HiPer HR und HiPer VR
 grün - Modem initialisiert/eingeschaltet
grün - Modem initialisiert/eingeschaltet- rot/grün blinkend im Sekundentakt - Basis funkt
- rot/grün blinkend in unregelmäßigen Abständen - Basis im undefinierten Zustand
- gelb/grün blinkend im Sekundentakt - Rover empfängt
- rot/grün/leer nacheinander blinkend - Modem getrennt, wird gerade konfiguriert oder wartet auf Befehl
Arbeit mit MAGNET Field
Das Base/Rover-RTK-Profil
Anpassung oder Neudefinition des Profils (Konfiguration) unter
... Beispiel mit screenshots zur Konfiguration folgt...
HINWEISE:
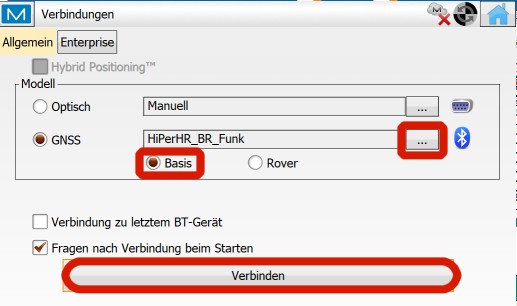
- Ein Base-/Rover-Profil ist vom Typ "RTK". Basis und Rover sowie die jeweiligen Funkeinstellungen werden im Profil separat konfiguriert.
- Auf identische resp. kompatible Modemkonfiguration mit identischer Frequenz achten!
- Bei Wechsel zwischen den Empfängern (Basis oder Rover) immer zuerst Trennen, dann zum anderen Empfänger wechseln.
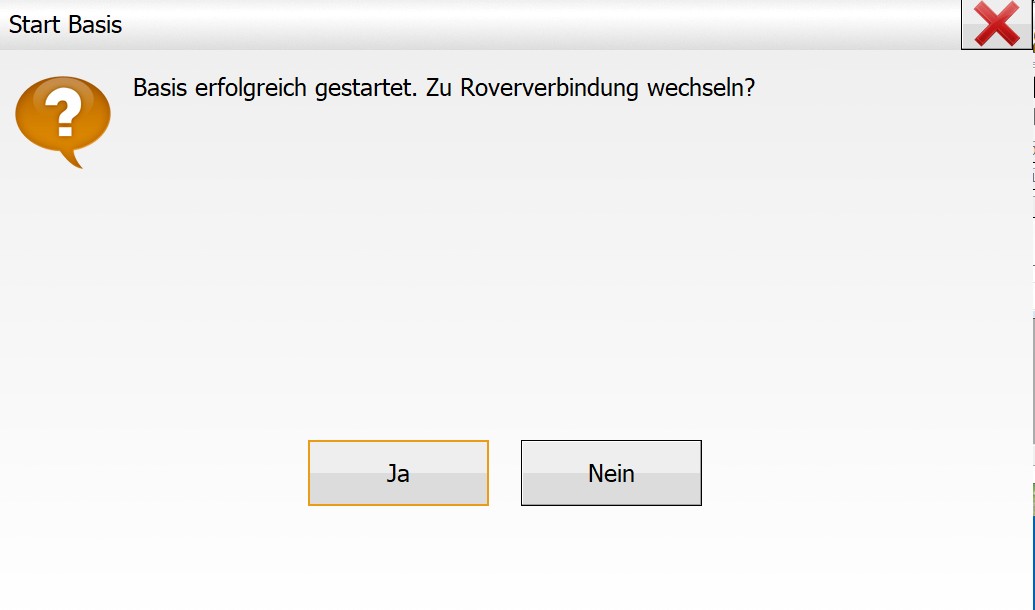
- Wird die Basis neu gestartet, fragt MAGNET Field nach erfolgreicher Initialisierung automatisch, ob zum Rover gewechselt werden soll. Bitte warten Sie diese Meldung ab!
- Die Konfiguration und Inbetriebnahme des Modems benötigt immer etwas Zeit, bitte haben Sie Geduld, bis eine Rückmeldung von MAGNET Field ausgegeben wird resp. im Rover eine FIXED-Position signalisiert wird
Prinzipielle Vorgehensweise
Importieren Sie Pläne und Absteckpunkte immer erst dann, wenn Sie sich sicher sind, dass das ausgewählte Koordinatensystem "passt" und mit dem Koordinatensystem der Pläne und Punkte übereinstimmt! Soll eine Lokalisation durchgeführt werden, importieren Sie Pläne und Absteckpunkte erst danach!
- Basis aufstellen (reproduzierbaren Standort wählen oder auf Festpunkt aufstellen)
- Neues MAGNET Field-Projekt erstellen
- Koordinatensystem festlegen entsprechend der Methoden A bis E
- Soll die Basis direkt eingemessen werden (Methode B,C,D), zuerst mit NTRIP-Profil mit der Basis verbinden und die ermittelten Koordinaten unter einem aussagekräftigen Punktnamen (z.B. Basis_Datum_Höhe) speichern
- Base/Rover-RTK-Profil auswählen
- Festpunkte oder Kontrollpunkte jetzt importieren oder manuell eingeben
-

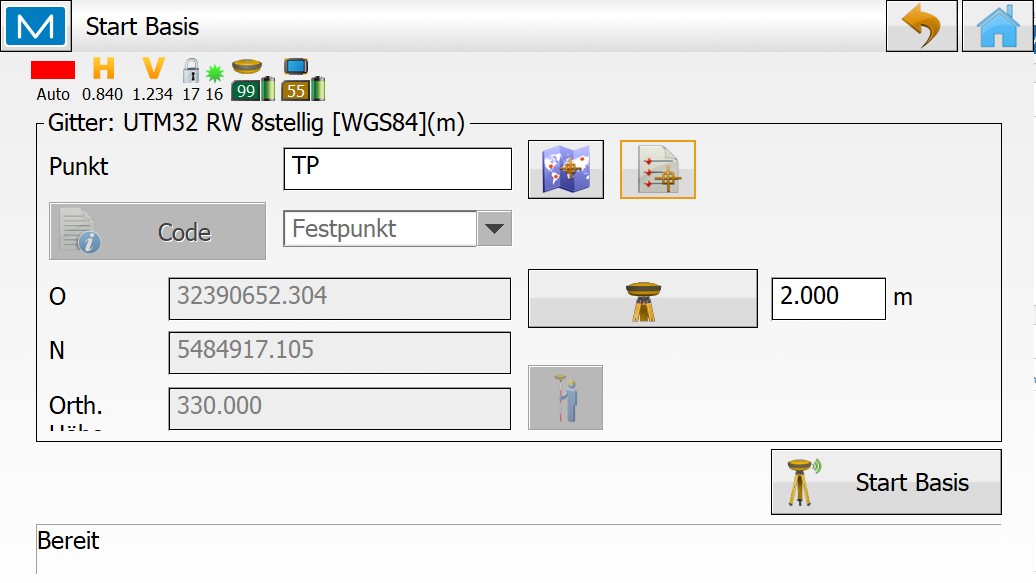
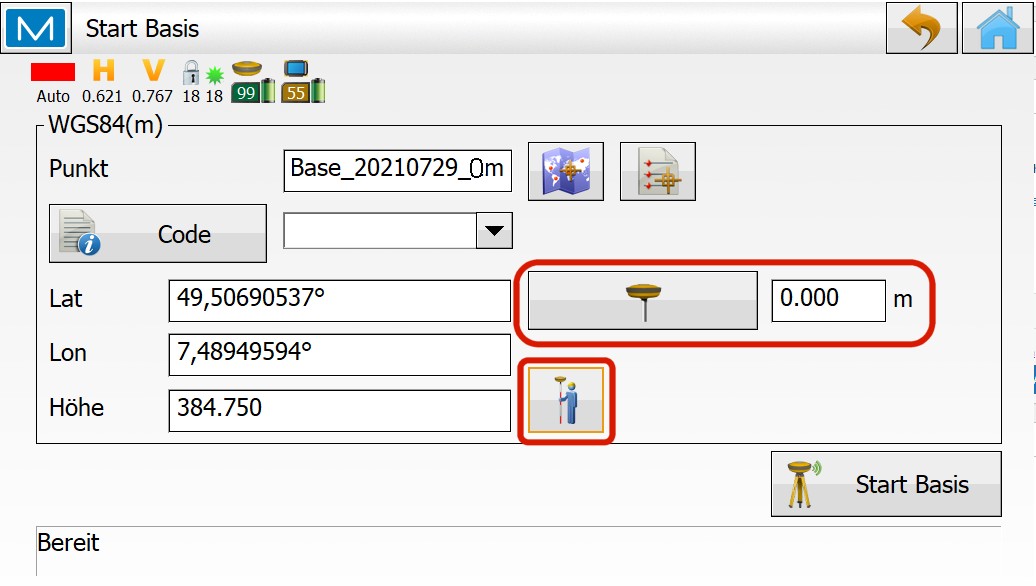
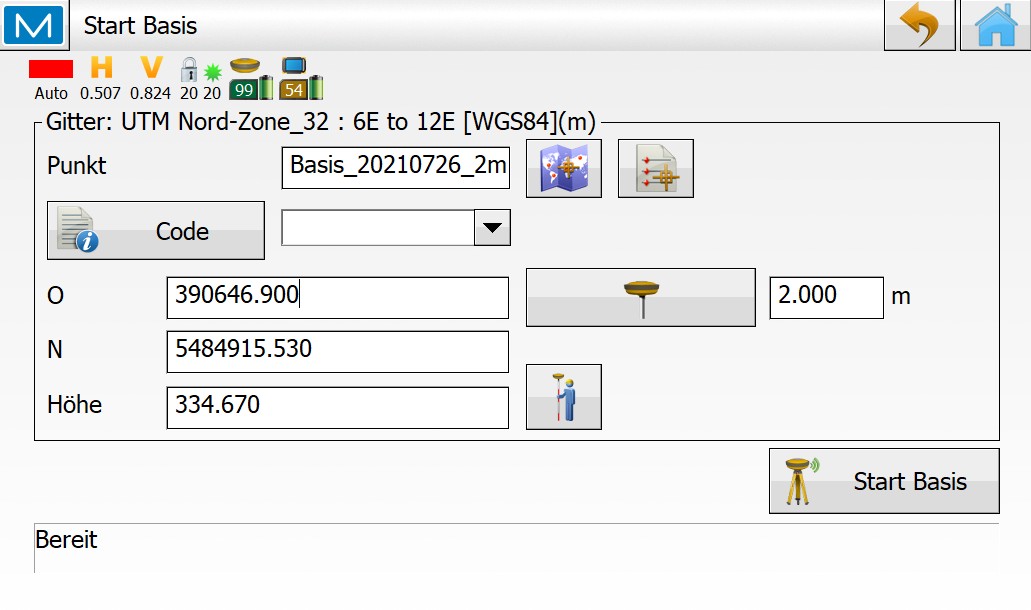
Basis starten
- Entsprechend der Methoden A bis E die Koordinaten der Basis festlegen
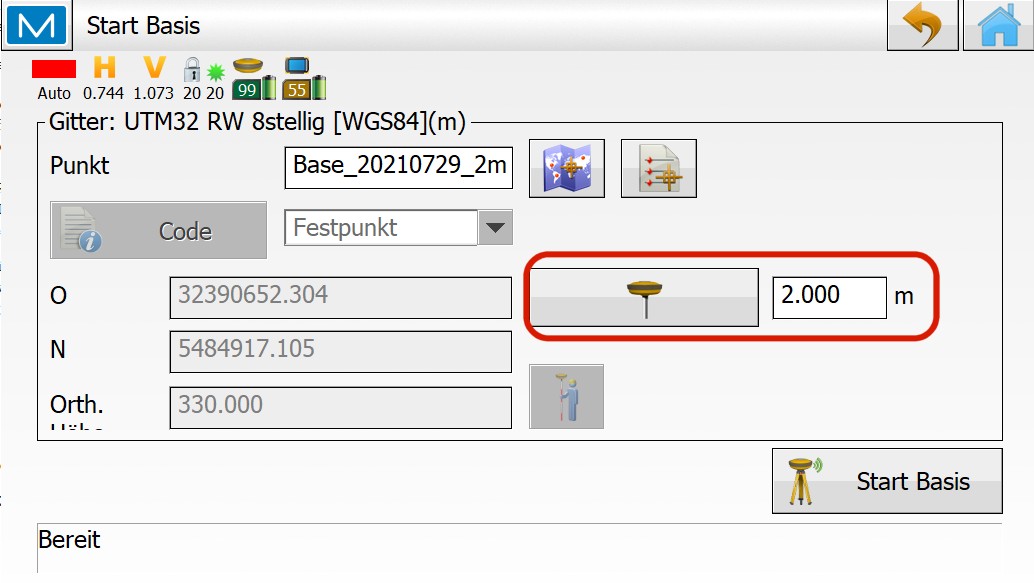
- Auf die richtige Eingabe der Höhe achten (vertikal/schräg)
- Punktname kontrollieren (z.B. Basis_Datum_Höhe)
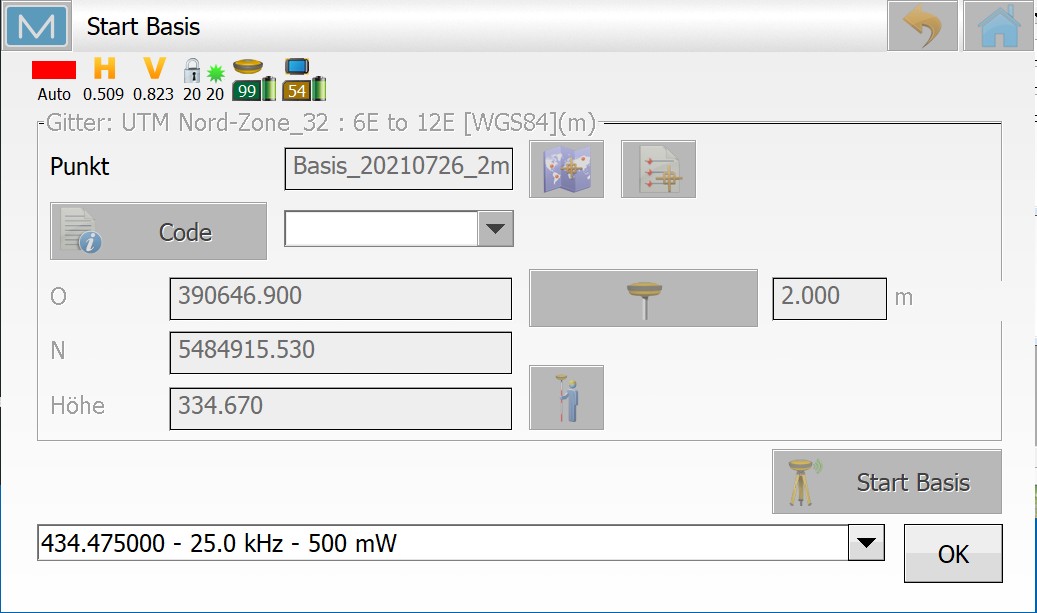
- Wurde zum ersten Mal in diesem Projekt die Basis gestartet, öffnet sich nun die Funkkonfiguration.
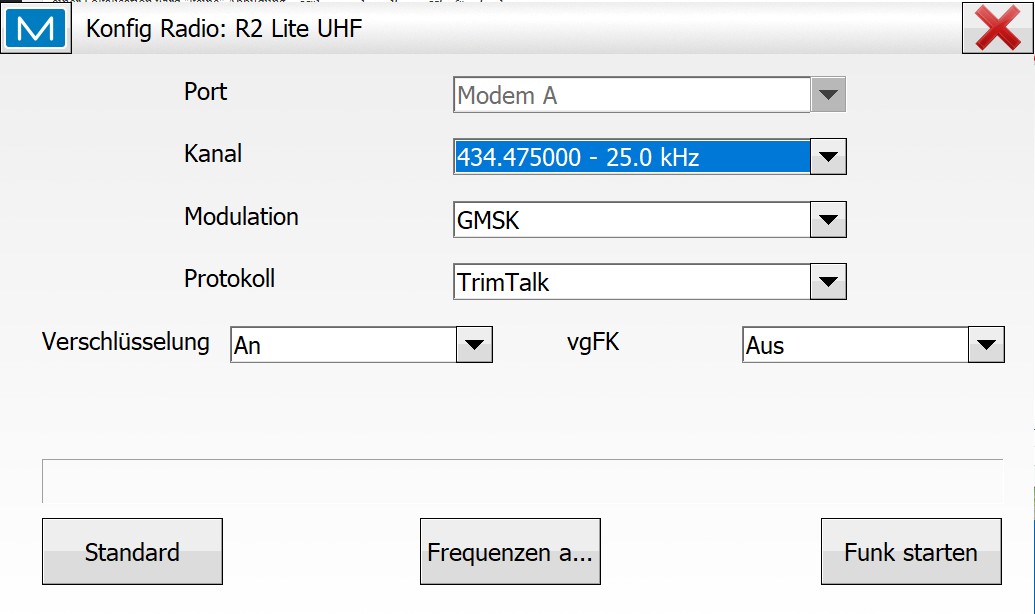
- Frequenzliste vom Empfänger abrufen, Wunschfrequenz auswählen, Sendeleistung optional anpassen
- Modemeinstellungen kontrollieren
- Funk starten
- Warten, bis Konfiguration durchgeführt wurde. Meldung von MAGNET Field "Zum Rover wechseln?" bestätigen
- Funk-LED an der Basis prüfen (HiPer VR: blinkt rot/grün)
- Mit Rover verbinden, Funkempfang startet automatisch, Fixing erfolgt innerhalb 1-5 Sekunden
- Kontrollpunkte messen zur Überprüfung der Funktion der Basis (!!!)
- Neupunkte aufmessen oder abstecken
Methode A: Aufstellung auf bekanntem Punkt, UTM-Abbildung
Diese Methode entspricht in etwa der Aufstellung auf bekanntem Punkt in der Tachymetrie.
- Projekt erzeugen mit RTK-Base/Rover-Profil
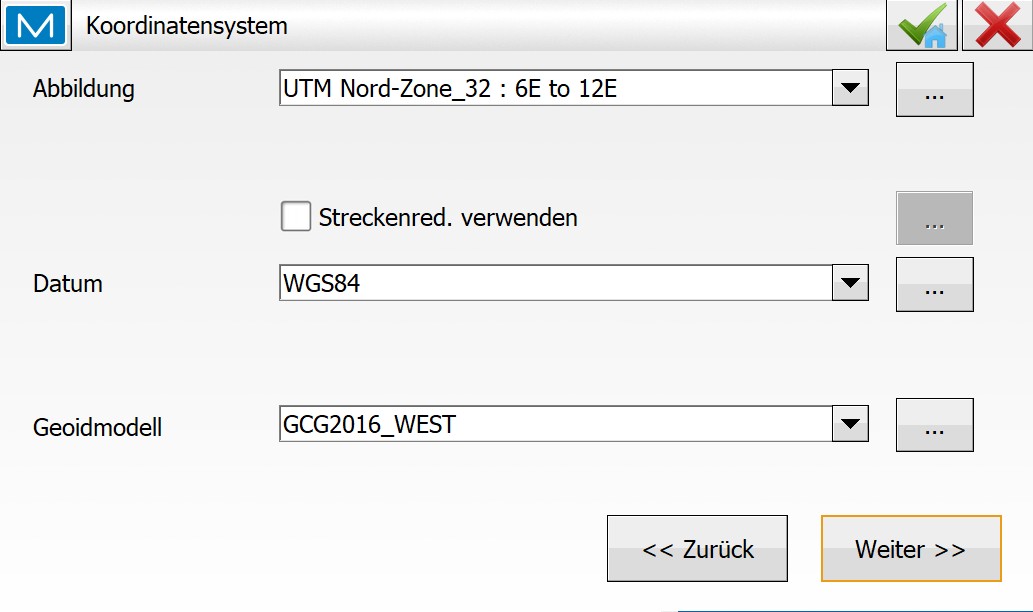
- Koordinatensystem: Abbildung UTM32, Datum ETRS89/WGS84, Geoiddatei einbinden (empfohlen)
- Koordinaten des Festpunkts importieren oder manuell eingeben
- Basis über dem Festpunkt (vermarkter Bodenpunkt) sorgfältig aufbauen, Antennenhöhe Hb ermitteln
- Mit Basis verbinden und Basis starten mit dem ausgewählten Festpunkt, Angabe der Antennenhöhe Hb und einem aussagekräftigen Punktnamen
- 3DMC: Geoiddatei per USB-Stick in 3DMC-Verzeichnis kopieren und im Projekt auswählen!
Methode B: Direktes Einmessen der Basis mit SAPOS, UTM-Abbildung
Diese Methode setzt voraus, dass SAPOS-Korrekturdaten via Mobilfunk empfangen werden können.
- Projekt erzeugen mit RTK-NTRIP-Profil
- Koordinatensystem: Abbildung UTM32, Datum ETRS89/WGS84, Geoiddatei einbinden
- Im NTRIP-Profil mit der Basis verbinden und die Position per NTRIP sorgfältig messen
- Wechsel zum RTK-Base/Rover-Profil und weiter wie unter A. Als Antennenhöhe dieselbe vertikale Antennenhöhe eingeben wie bei der NTRIP-Messung.
- 3DMC: Geoiddatei per USB-Stick in 3DMC-Verzeichnis kopieren und im Projekt auswählen!
Methode C: Direktes Einmessen mit TopNET live / AXIO-NET, Gauß-Krüger-Abbildung
Diese Methode setzt voraus, dass Korrekturdaten von AXIO-NET oder TopNET live via Mobilfunk empfangen werden können.
- Projekt erzeugen mit RTK-NTRIP-Rover-Profil
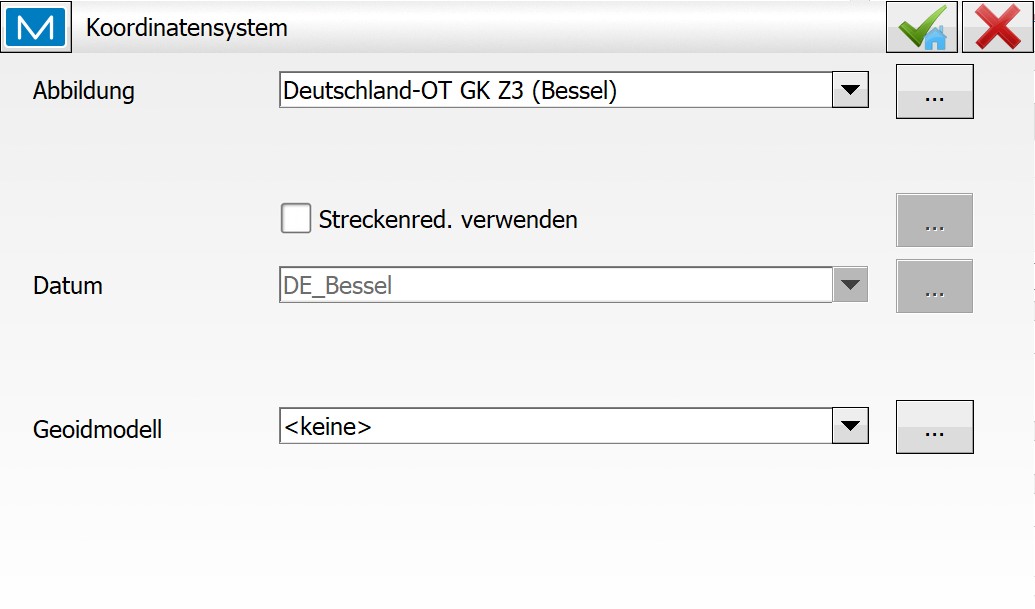
- Koordinatensystem: Abbildung GK Streifen X, Datum DE_Bessel, keine Geoiddatei
- Im Rover-Profil mit der Basis verbinden, wie gewohnt die Position per NTRIP sorgfältig messen, Mountpoint 08-AXIO, AX-TRANS, GER_03, GER_23, ansonsten wie unter B.
- Wechsel zum RTK-Base/Rover-Profil und weiter wie unter A. Als Antennenhöhe dieselbe vertikale Antennenhöhe eingeben wie bei der NTRIP-Messung.
- 3DMC: Sollten Abbildung und Datum für GK fehlen, müssen die entsprechenden xml-Dateien per USB-Stick in den Ordner \CoodSys kopiert werden (gleiche Verzeichnisstruktur wie in MAGNET Field!)
Methode D: Direktes Einmessen mit TopNET live / AXIO-NET, UTM-Abbildung
- Wie unter C, einzige Unterschiede:
- Projekt erzeugen mit RTK-NTRIP-Rover-Profil
- Koordinatensystem: Abbildung UTM32, Datum DE_UTM, keine Geoiddatei
- Mountpoint 17-AXIO, AX-NHN, GER_10, GER_28
Methode E: Lokalisation über mehrere Festpunkte (Kontrollpunkte)

Diese Methode entspricht der freien Stationierung in der Tachymetrie und benötigt keine NTRIP-Korrekturdaten.
Die genauen WGS84/ETRS89-Koordinaten(*) der Basis sind nicht bekannt, daher wird die Basis mit Näherungskoordinaten gestartet. Der Rover, der diese Korrekturdaten von der Base empfängt, ermittelt daraufhin "falsche" Positionen mit einem im Baustellenareal meist konstanten Offset.
In MAGNET Field wird daher für das Projekt eine "Lokalisation" (Transformation) durchgeführt, die die verschobenen Rover-Position auf die richtige Sollposition überführt. Die Lokalisation erfolgt durch Einmessung von mehreren Festpunkten (Kontrollpunkten) mit bekannten Koordinaten. Somit werden Ist-Soll-Punktpaare erzeugt und die Lokalisationsparameter per least-square-fit berechnet. Es spielt dabei keine Rolle, ob die Kontrollpunkte in UTM oder Gauß-Krüger vorliegen.
Die Vorgehensweise:
- Projekt erzeugen mit RTK-Base/Rover-Profil
- Koordinatensystem: Abbildung <keine>, Datum ETRS89/WGS84, Geoiddatei <keine>
- Mehrere Festpunkte werden in das Projekt importiert (Abbildung <keine>, Datum <keine>). Die Festpunkte sollten auf der gesamten Fläche des Areals gut verteilt sein
 Mit Basis verbinden, Basis starten mit Näherungskoordinaten und Antennenhöhe vertikal
Mit Basis verbinden, Basis starten mit Näherungskoordinaten und Antennenhöhe vertikal - Mit Rover verbinden, FIXING abwarten, Lokalisation durchführen
- Nacheinander alle Festpunkte ablaufen und einmessen), Fehlerhaushalt (Restklaffen) kontrollieren
- 3DMC: Lokalisation als gc3-Datei aus Projekt exportieren und in 3DMC kopieren.
Methode F: Basis korrigieren - Anpassung des Koordinatensystems durch Korrektur der Basisposition

Verwenden Sie diese Methode vorsichtshalber nicht für Projekt/Datentransfer nach 3DMC
Methode G: Streckenreduktion - Anpassung des Koordinatensystems durch Transformation in der Ebene
Die Basis starten im Detail
... folgt ...
Fragen zu MAGNET Field (FAQ II)
Höhenkorrektur über Korrekturdaten oder Geoiddatei?
Bei der Arbeit mit eigener Basis empfehlen wir die Einbindung des offiziellen Geoids in MAGNET Field und 3DMC. Die Nutzung der Höhenkorrekturen, die z.B. über SAPOS-Korrekturdaten geliefert werden, können im Zusammenspiel mit verschiedenen Rovern, Basis-Standorten, der Maschinensteuerung und abwechselndem NTRIP-Einsatz zu irritierenden Effekten führen. Die Geoiddatei ist für ganz Deutschland oder für Teilgebiete gegen Gebühr erhältlich beim BKG, teilweise auch über die Landesvermessungsämter.
Was ist besser: direkte Einmessung oder Lokalisation?
Die Aufstellung auf bekanntem Punkt (Methode A) oder die direkte Einmessung (B, C, D) sind relativ einfach zu verstehen und transparent, erfordern allerdings ein äußerst penibles Vorgehen bei Aufstellung resp. Einmessung. Die Lokalisation (E) macht dies durch eine statistische Überbestimmung oft mehr als wett, je mehr gute Kontrollpunkte, desto besser.
Ein Vorteil der Methoden A bis D ist, dass - perfekte Einrichtung der Basis vorausgesetzt - im selben Projekt nahtlos zwischen Base/Rover und NTRIP-Verfahren gewechselt werden kann bei gleichbleibendem Koordinatensystem. Die erhaltenen Koordinaten sind - im Rahmen des Fehlerhaushalts - unabhängig von der Methode. Beim Einsatz mehrerer GNSS-Systemen auf mehreren Baustellen kann dies die Arbeit erleichtern. Desweiteren kann auf der 3DMC-Maschine mit den dort bereits vorhandenen Koordinatensystemen (identisch in MAGNET Field und 3DMC) resp. dem einmalig importierten Geoid gearbeitet werden, unabhängig vom Projekt. Als Nachteil müssen u.U. Abstriche in der Genauigkeit in Kauf genommen werden, da die statistische Überbestimmung der Lokalisation fehlt.
Kann auf der Baustelle zwischen Base/Rover- und NTRIP-Technik gewechselt werden?
Dies ist prinzipiell möglich bei Methode A bis D, sogar innerhalb eines Projekts. Durch Verwendung von Standard-Koordinatensystemen kann sehr schnell und flexibel mit unterschiedlichen Roversystemen gearbeitet werden, auch baustellenübergreifend, und die Projekte können im Anschluss ohne Komplikationen zusammengeführt werden. Es sollte nur darauf geachtet werden, dass die Geoiddatei auf allen Systemen inkl. 3DMC installiert ist. Eine penible Einrichtung der Basis ist zwingend notwendig!
Muss die Basis nach dem Einschalten immer neu gestartet werden?
Wurde die Basis während der Korrekturdatenaussendung ausgeschaltet, sendet sie nach Wiedereinschalten sofort weiter. Ein Neustarten ist also nur erforderlich, wenn sich die Position der Basis geändert hat.
Was tun bei Störungen?
Die Funkübertragung funktioniert nicht, der Empfänger verliert immer wieder den Fixed-Status ? Ursachen und Maßnahmen:
GNSS-Probleme
- Überprüfen Sie bei Base und Rover die Satellitenverfügbarkeit (Skyview)
- Deaktivieren Sie auf der Base ein Satellitensystem (z.B. Beidou)
- Ändern Sie an Base und Rover das Datenformat (bevorzugt: RTCM)
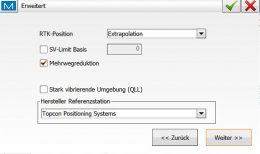
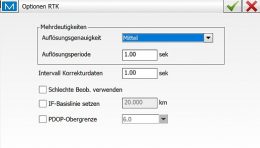
- Modifizieren Sie am Rover diverse RTK-Einstellungen (advanced, siehe Abbildungen, nach Rücksprache mit dem Support)
Funk-Probleme
- Überprüfen Sie zuerst die Funk-LED an Basis und Rover!
- Basis sendet: blinkt rot oder rot/grün, Rover empfängt: blinkt gelb oder gelb/grün (siehe auch HiPer II)
- Die Basis-LED ist aus? Verbinden Sie sich mit der Basis, dann
- Basis neu starten. LED blinkt nicht? dann
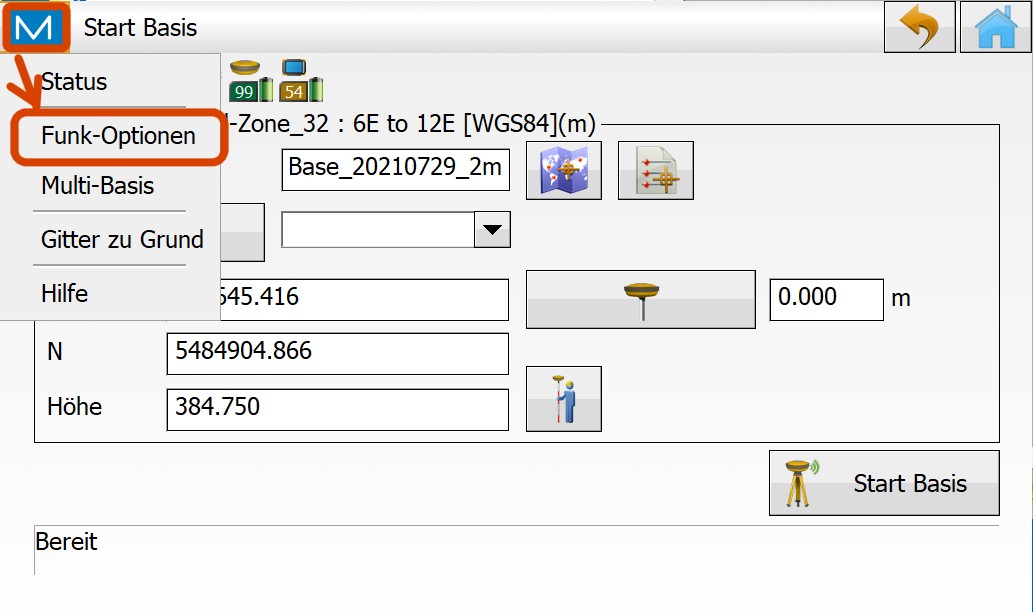
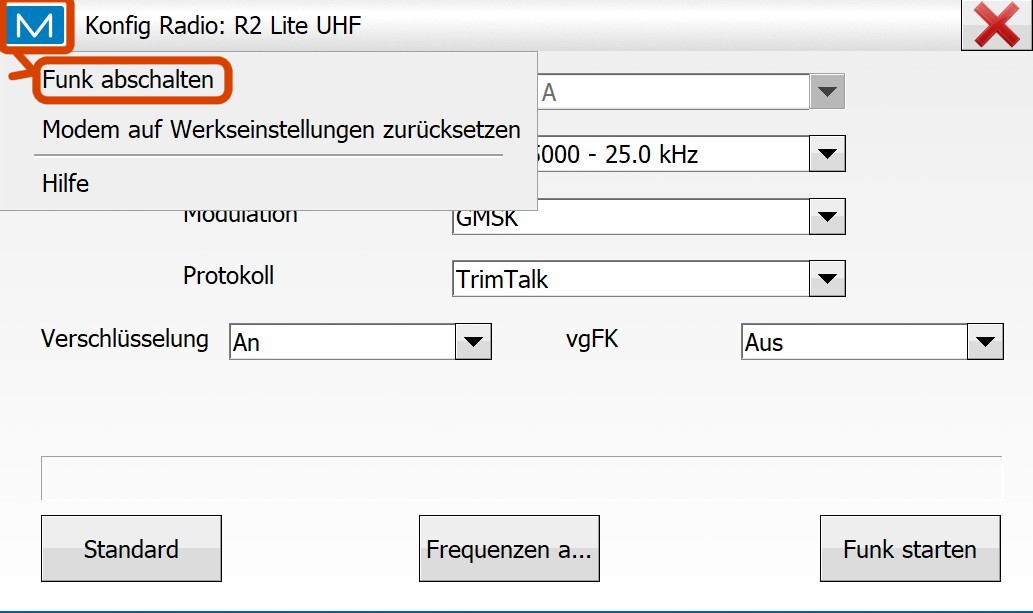
- >Funk-Optionen:
-
-
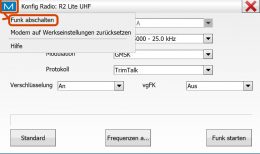
Funk beenden >Funk beenden
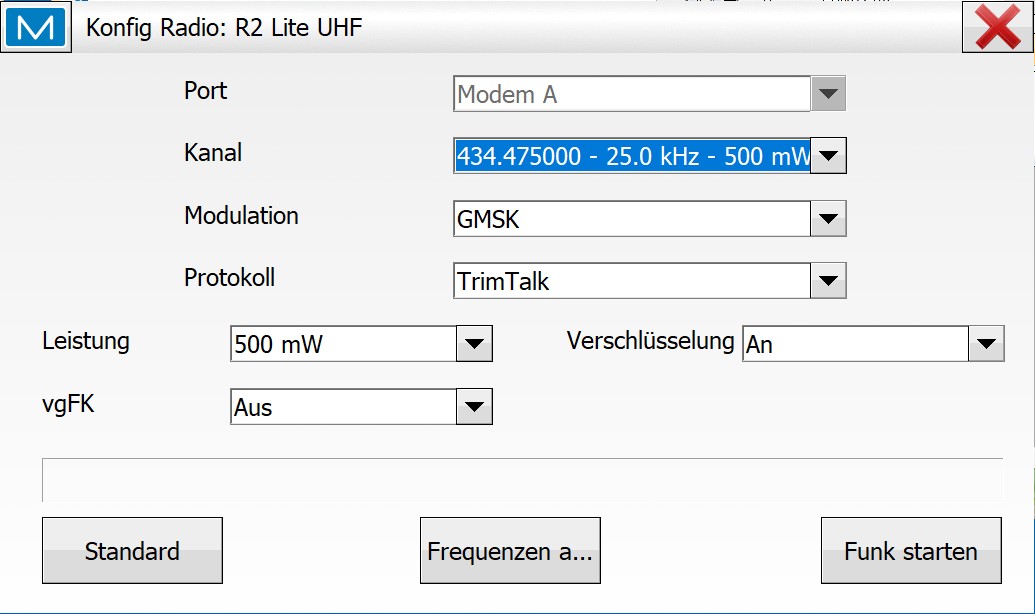
- Frequenzliste neu abrufen
- Modemeinstellungen kontrollieren
- Funk neu starten
-
-
- Überprüfen Sie die Funk-Einstellungen im Profil - diese müssen für Basis und Rover identisch sein. Die Sendeleistung an der Basis sollte mind. 100 mW betragen, Standard sind 500 mW
- Auf kurze Distanzen wählen Sie 100mW Sendeleistung und/oder eine kurze Antenne an der Base
- Maßnahmen am Rover: Funk-Einstellungen im Profil kontrollieren!
- Basis- und Rover ausschalten und wieder einschalten, Basis neu starten
- Überprüfen Sie die optische Sichtverbindung Basis <> Rover. Idealerweise wird die Basis immer etwas oberhalb des Areals auf einem Hügel mit Rundumblick o.ä. platziert. Auch wenn eine gute Funkverbindung eine quasi-optische Sichtverbindung erfordert, stellen Buschwerk, vereinzelte niedrige Gebäude oder Bodenwellen, sofern sie nicht unmittelbar vor Basis oder Rover stehen, meist kein Hindernis dar.
- Wechseln Sie die Frequenz bei Basis und Rover
- Wählen sie ein anderes Protokoll mit Verschlüsselung
- Wird ein externes Modem verwendet, überprüfen Sie das Kabel (Wackelkontakt?), nehmen ein kürzeres Kabel oder Ferrite für Entstörung. Ist die Spannungsversorgung ausreichend?
- Wechseln Sie die Antenne (Sturzschaden? intern gebrochen?)
- Setzen Sie die Funkantenne der Basis über ein etwas längeres Kabel vom Gerät ab.
- Defekte Geräte/Maschinen oder ein starker Sender auf gleicher oder benachbarter Frequenz in nächster Umgebung können jegliche Datenübertragung zunichte machen... hier hilft eine versierte Elektronikfachperson mit geeigneten Messgeräten oder - in letzter Instanz - die Bundesnetzagentur.
Links
(*) Für den praktischen Gebrauch können das europäische ETRS89- und das globale WGS84-Bezugssystem gleichwertig genutzt werden, da sich die jew. Rotationsellipsoide (GRS80 bzw. WGS84) in Dimension und Ausrichtung im Raum kaum unterscheiden.